Trajectory Analysis and Semantic Region Modeling Using A Nonparametric Bayesian Model
Introduction
We use a novel nonparametric Bayesian model, Dual Hierarchical Dirichlet Processes (Dual-HDP), for trajectory analysis and semantic region modeling in surveillance settings, in an unsupervised way. In our approach, trajectories are treated as documents and observations of an object on a trajectory are treated as words in a document. The word value is an index of location and moving direction. Trajectories are clustered into different activities. Abnormal trajectories are detected as samples with low likelihoods. The semantic regions, which are intersections of paths commonly taken by objects, related to activities in the scene are also modeled. Dual-HDP advances the existing Hierarchical Dirichlet Processes (HDP) language model. HDP only clusters co-occurring words from documents into topics and automatically decides the number of topics. In our problem, a topic is a semantic region. Dual-HDP co-clusters both words and documents. It learns both the numbers of word topics and document clusters from data. Under our problem settings, HDP only clusters observations of objects, while Dual-HDP clusters both observations and trajectories. This framework differs from previous trajectory analysis approaches in several aspects:
1. Different from prior similarity-based clustering approaches, it clusters trajectories using a generative model. There is a natural probabilistic explanation for the detection of abnormal trajectories.
2. Using Dirichlet Process, the number of activity categories and semantic regions are automatically learnt from data instead of requiring manual definition.
3. Instead of using a spatial distance measure uniformly over the scene, it models the spatial distributions of different activities. It separates activity-related structures close in space. It is more robust to projective distortion.
4. The space complexity of our algorithm is O(N) instead of O(N^{2}) in the number of trajectories.
A detailed description of this work can be found in [1] and [2].
Results on a parkinglot data set
40,453 Trajectories are collected from a parking lot scene over one week. They are shown in Figure 1. 30 semantic regions and 22 clusters of trajectories are
learnt from this data set. Some of them are shown in Figure
2 and 3. The first and third semantic regions explain
vehicles entering and exiting the parking lot. Most other semantic
regions are related to pedestrian activities. Because
of opposite moving directions, some region splits into two
semantic regions, such as semantic regions 2 and 7, 9 and
12, 5 and 14. Similarly objects on trajectories (see Figure 3)
in clusters 2 and 3, 5 and 11 are moving in opposite directions.
Many outlier trajectories are in small clusters, such
as clusters 20, 21 and 22. The top 100 abnormal trajectories
are shown in Figure 4. Some horizontal trajectories on the
grass field are detected as abnormalities (some of them are
also found in cluster 22). Some of them were caused by a
worker shearing the grass back and forth, which happened
only once.
 |
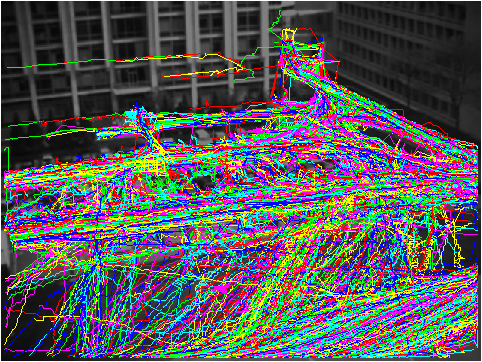 |
Figure 1. Background image of a parking lot (left) and Tracks collected from the parking lot scene (right). only 4,404 out of 40, 453 tracks are shown here.
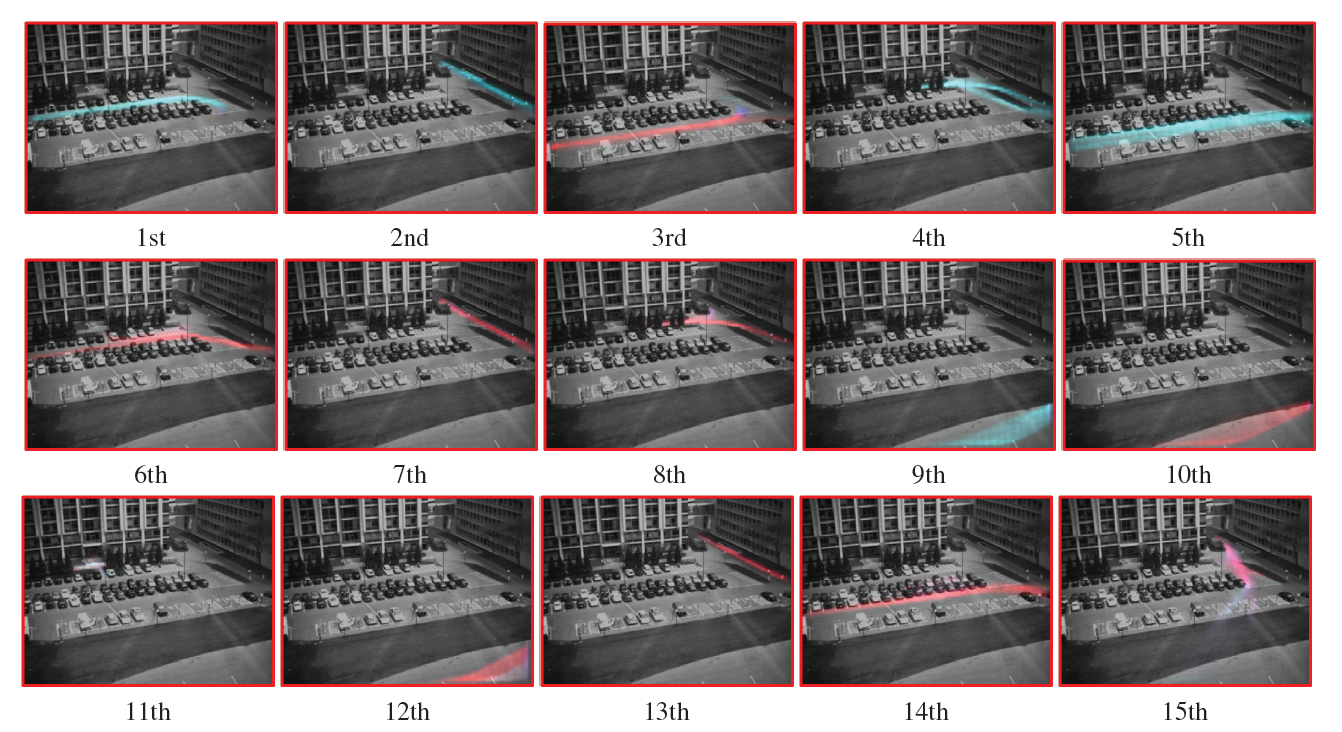
Figure 2.Some semantic regions learnt from the parking lot data set. Plot their distribution over space and moving direcitions. Colors represent different moving directions: left (red), right (cyan), upward (magenta), downward (blue).
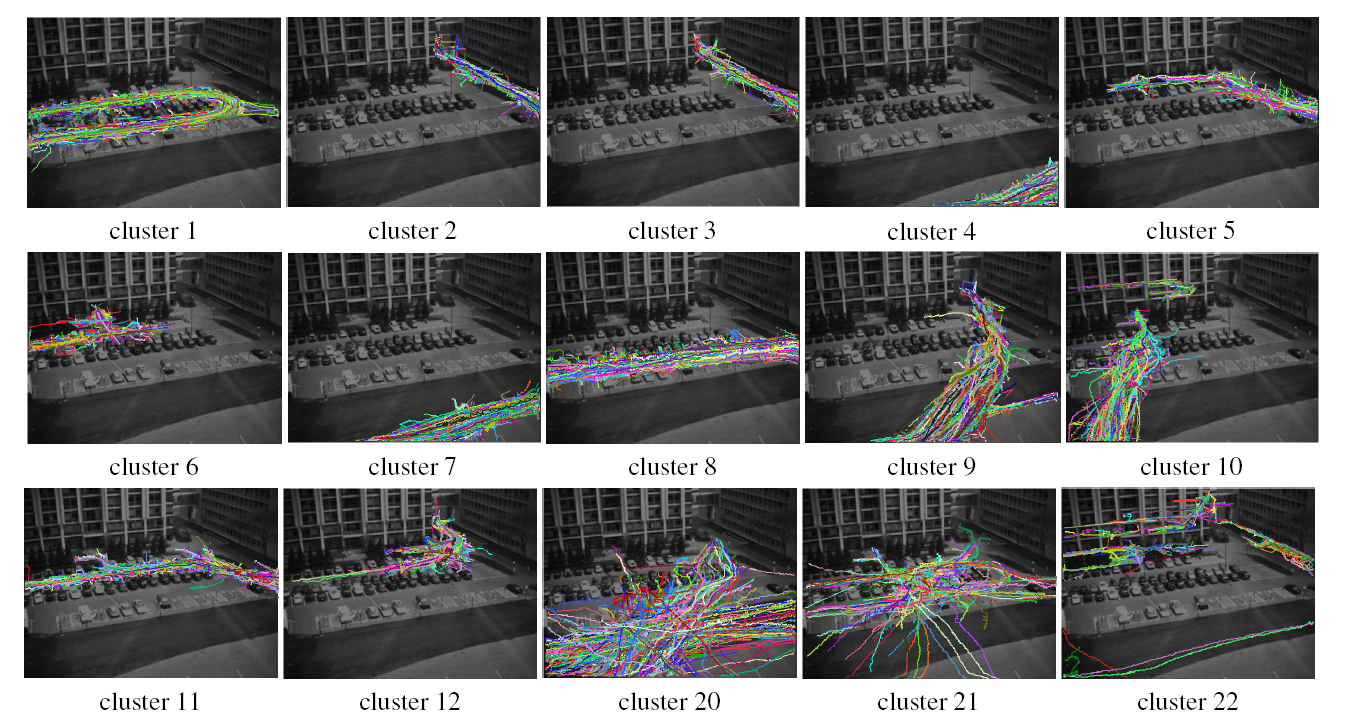
Figure 3. Some clusters of trajectories from the parking lot data set.

Figure 4. Top 100 abnormal trajectories in the parking lot data set.
[1] X. Wang, and E. Grimson, “Trajectory Analysis and Semantic Region Modeling Using A Nonparametric Bayesian Model,” in Proceedings of IEEE Computer Society Conference on Computer Vision and Patter Recognition (CVPR) 2008. [PDF]
[2] X. Wang, K. T. Ma, G. Ng, and E. Grimson, “Trajectory Analysis and Semantic Region Modeling Using A Nonparametric Bayesian Model,” Tech. Rep. MIT-CSAIL-TR-2008-015. http://hdl.handle.net/1721.1/40808.